TOPS (10/6/2023)
About
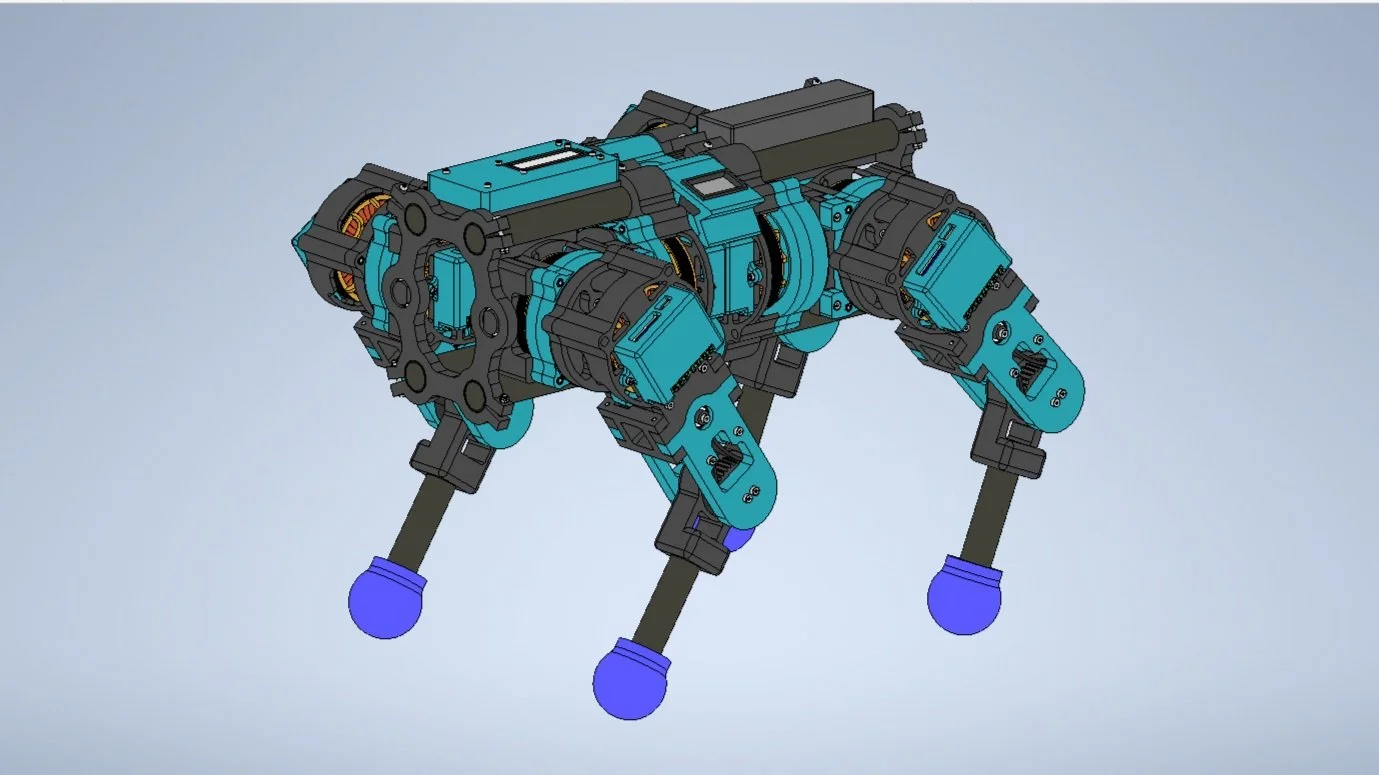
TOPS (Traverser of Planar Surfaces) or SPOT backward is a 12DOF quadrupedal robot. I have attempted robot dogs in the past, but nothing has come close to having the natural gait of an actual dog. In this project, the goal is to make a more dynamic quadrupedal robot. This project was heavily inspired by James Bruton's openDogV3 robot.
4 Month Build
Total Cost: $3,300
Total Weight: 29.6lbs (13.43kg)
Weight of 3D Printed Parts: 9.98lbs (4.53kg)
12x Custom QDD actuators
3D printed 9: 1 planetary gearbox
90KV brushless motor
ODrive S1 FOC Controller
Carbon Fiber Frame
30A Silicone Feet
6S 5200mah Lipo Battery
Teensy 4.1 Microcontroller
Hackaday (project logs)
GitHub (CAD, Code, BOM, etc…)