
ARES
What?
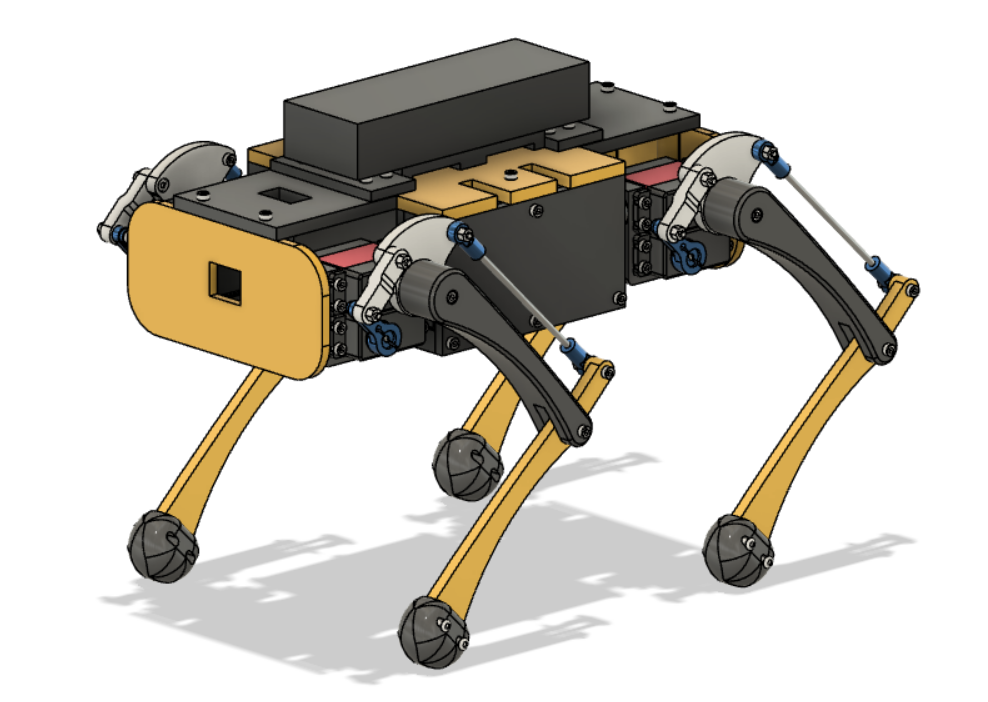
ARES is a 12 DOF 3D printed Quadrupedal Robot.
Demonstrates dynamic robotic motion.
ARES is my 4th attempt at a quadrupedal robot. Predecessors include: Zeus, Zeus 2.0, and Hercules.

How?
Created inverse kinematic models to control gait sequences.
Uses 12 x RC servos for actuation
Designed in Autodesk Fusion 360.
Manufactured via FDM printing in ABS, PLA, and TPU filament.

Results?
Operational on various terrains
Lightweight
Fully documented and open-sourced
Won Grand Prize ($500) in the Electronics Contest
Could add autonomous features in the future